
Реализация принципа Холла джойстика
2023-08-08Обычно в процессе использования джойстика существует два способа получения аналогового выходного сигнала: в виде датчика Холла и в виде потенциометра.
1, Цель данной статьи – разъяснить основной принцип реализации датчика Холла, различия, преимущества и недостатки между 2D- и 3D-датчиками Холла.
Определение эффекта Холла:
Эффект Холла был открыт физиком Холлом в 1879 году. Он определяет связь между магнитным полем и индуцированным напряжением. Этот эффект полностью отличается от традиционной электромагнитной индукции.
-Изображение из Интернета
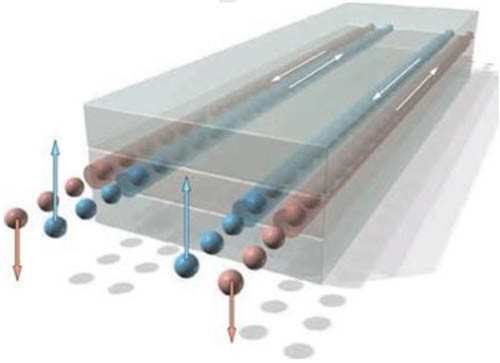
Как было показано выше, при прохождении электрического тока через проводник, находящийся в магнитном поле (заштрихованная поверхность), магнитное поле действует на электроны в проводнике перпендикулярно направлению движения электронов, в результате чего возникает разность потенциалов в обоих направлениях, перпендикулярных проводнику и линии магнитной индуктивности.
При приложении к полупроводнику магнитного поля, перпендикулярного направлению тока, электроны и дырки в полупроводнике будут притягиваться силой Лоренца в разных направлениях и собираться в разных направлениях. Между собравшимися электронами и дырками возникнет электрическое поле. После того как силы электрического поля и силы Лоренца уравновесятся, они перестанут объединяться. В этом случае электрическое поле заставит последующие электроны и дырки подчиниться силе электрического поля и уравновесит силу Лоренца, создаваемую магнитным полем, так что последующие электроны и дырки смогут проходить через него плавно и без отклонений, что и является эффектом Холла. Разность напряжений между двумя сторонами называется напряжением Холла.
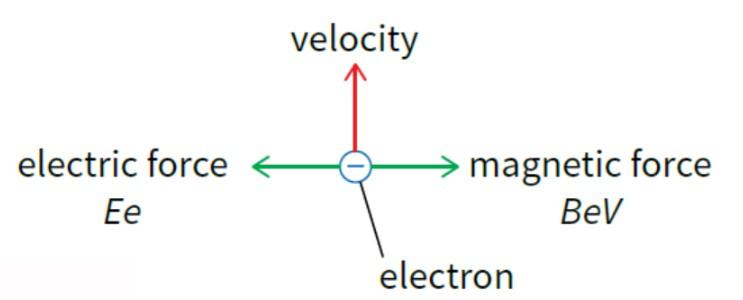
Принципиальная схема
Электрон создает разность потенциалов в магнитном поле, что приводит к возникновению силы Лоренца
Сила Лоренца F=qE+qvB/c
Таким образом, поле Холла
UH=RH-I= -B-I /(q-n-c)
Применение эффекта Холла:
Хотя эффект Холла был открыт раньше, его применение было ограничено развитием постоянных магнитов и электронных компонентов. Впервые датчики Холла появились примерно в 1970-х годах.
Базовый датчик Холла выполнен в виде высоконадежной интегральной схемы на микросхеме Холла путем упаковки микросхемы из монокристаллического кремниевого материала в герметичную упаковочную структуру.
Однако из-за проблем, связанных с конструкцией схемы, впервые использованная микросхема Холла будет давать большие изменения напряжения из-за температурного дрейфа, что не может быть применено в реальных промышленных условиях.
В дальнейшем, примерно до 1990-х годов, некоторые компании, например MLX, использовали схемы температурной компенсации для нивелирования влияния температурных параметров в формуле расчета магнитного поля, благодаря чему магнитное поле не изменяется с изменением температуры. Кроме того, в микросхеме Холла реализовано программируемое управление, что позволяет не адаптировать аналоговый выход, задаваемый микросхемой Холла, к требованиям использования и значительно расширяет сценарий и область применения микросхемы Холла.
Микросхема Холла начала широко применяться в промышленности и автомобилях, где она используется для определения параметров смещения и угла поворота и преобразования их в аналоговый выход.
Вслед за компанией MLX к разработке микросхемы Холла подключились многие производители ИС в стране и за рубежом. Обычные микросхемы Холла, используемые в настоящее время, обычно состоят из нескольких микросхем Холла, наложенных друг на друга для резервирования, что значительно повышает разрешение и точность аналогового вывода.
Использование микросхемы Холла в ручках:
В ранних промышленных рукоятках аналоговый выход обеспечивался за счет вращающейся структуры рукоятки, которая толкала пулю для привода гидравлического клапана. При этом будут иметь место недостатки в интеллектуальном управлении и логическом проектировании, а в гидравлическом устройстве неизбежно возникнет явление утечки масла, что не может быть использовано в местах с высокими требованиями к уровню загрязнения или в местах, требующих чистой окружающей среды.

Гидравлическое использование пулевой формы
-Изображение из Интернета
Холл был впервые использован в джойстиках немецкой компанией Danfoss. Ее основными продуктами являются JS1, JS1000 и т.д.
В ручках широко используются микросхемы Холла таких производителей, как MLX, TI, McGahn и др.
Существуют различия между плоским 2D-холлом и 3D-холлом в зависимости от различных методов использования.
Разница между двухмерным и трехмерным Холлом:
Обычно использование Холла в рукоятке подразделяется на вращательное, смещающее и качающееся. Поворотный тип – это 2D Hall, а смещение и поворот – это 3D Hall.
* Обратите внимание на использование магнитной стали:
Независимо от формы Холла, для достижения стабильности его работы существуют два критических требования к контролю.
Первое – это расстояние между магнитной сталью и центром Холла, которое варьируется в зависимости от различных моделей микросхем Холла. Обычно оно составляет около 1~5 мм.
Второй – величина намагниченности магнитной стали, которая в зависимости от модели микросхемы Холла различна, обычно составляет от десятков мТл до сотен мТл.
Если один из этих двух параметров выходит за пределы диапазона или отклонение от него велико, это приведет к нестабильности микросхемы Холла, что приведет к мутации выходного сигнала или его отклонению.
Кроме того, в общем случае магнитная сталь не будет вызывать отклонений на выходе из-за размагничивания при длительном использовании, а ее ключевым параметром является коэрцитивная сила магнитной стали. Под коэрцитивной силой понимается интенсивность магнитной индукции B, которая не возвращается к нулю при возвращении внешнего магнитного поля после насыщения намагниченности магнитных материалов. Только при добавлении магнитного поля определенной величины в направлении, противоположном исходному полю намагничивания, интенсивность магнитной индукции может вернуться к нулю, что называется коэрцитивным магнитным полем или коэрцитивной силой.
В общем случае для коэрцитивной силы магнитной стали требуется Hcb≥850KA/м; для внутренней коэрцитивной силы Hcj≥955KA/м. Основным влияющим фактором является материал магнитной стали. Как правило, коэрцитивная сила ферритового материала мала, что приводит к размагничиванию магнитной стали в течение длительного времени. А коэрцитивная сила материала NdFeb больше, обычно не требует длительного использования при высоких температурах (выше 60~80℃), поэтому срок службы составляет около пяти-десяти лет.
Магнитная сталь, используемая для изготовления ручки, обычно представляет собой магнитную сталь N35 Ndfeb.
Другими контролируемыми элементами магнитной стали являются реманентность Br и максимальное произведение магнитной энергии BH(max).
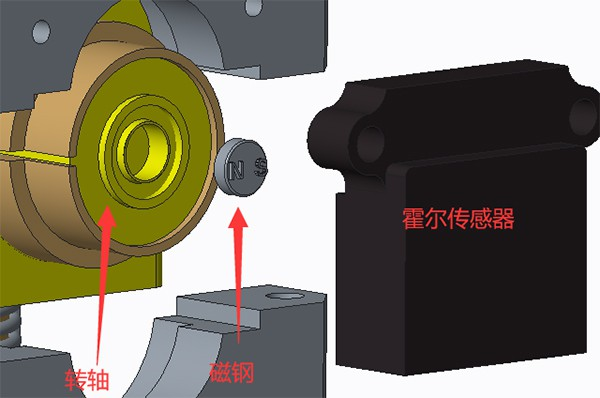
- 1.Роторный тип:
Поворотная рукоятка обычно устанавливается в центре оси вращения, а направление намагничивания является радиальным. При вращении вала рукоятки возникает напряжение Холла, обусловленное изменением магнитного потока, проходящего через датчик Холла.
Преимуществами такого способа использования являются:
- 1.Хорошая симметрия напряжения;
- 2.Низкая сложность реализации;
- 3.В случае двухвальной рукоятки интерференция по оси XY невелика;
- 4.Одноосевая рукоятка занимает меньше места.
- 5.Низкая сложность намагничивания.
- 6.Угол поворота может быть большим (менее 360°).
К недостаткам относятся:
- 1.При реализации двухкоординатной рукоятки она занимает относительно много места;
- 2.Должна использоваться в центре вращения.
*** Переведено с помощью www.DeepL.com/Translator (бесплатная версия) ***
Тип вращения
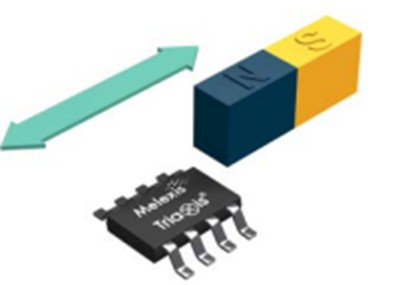
- 1.Формула смещения:
Обычно при использовании смещения используется и 3D-холл, например, первый флажок микросхемы MT1531. Обычно направление намагничивания является радиальным. Таким образом, магнитное поле стали должно иметь магнитный поток 0mT в средней точке, который максимален с обеих сторон. При намагничивании магнитной стали таким способом необходимо предъявлять требования к равномерности намагничивания с обеих сторон полосовой магнитной стали или изогнутой магнитной стали. Если размер магнита будет разным, то распределение магнитного потока будет неравномерным, что приведет к линейному отклонению выходного сигнала с обеих сторон при встряхивании рукоятки.
Преимущества:
- 1.Простая конструкция и низкая цена вытеснителя;
- 2.Структурная фаза магнитной стали, которую трудно разместить в центре вращения, лучше;
- 3.Гибкая структура, можно сделать больше разновидностей структуры.
Недостатки:
- 1.Магнитная сталь нуждается в симметрии намагничивания;
- 2.В общем случае очень трудно реализовать линейную симметрию формулы смещения;
- 3.Угол поворота не должен быть слишком большим; (обычно не превышает 40°)
–Изображение из спецификации MLX90333
- 1.Качающийся тип:
Качающийся Холл является распространенной реализацией двухосного Холла. Он реализует двухосевой или даже многоосевой выход одного чипа путем наложения нескольких чипов Холла на датчик Холла.
Обычно направление намагничивания магнитной стали – осевое, и осевое намагничивание круглой магнитной стали значительно снизит сложность намагничивания.

–Изображение из спецификации MLX90333v
Для датчиков Холла, хотя один 3D-чип стоит дороже 2D-чипа, стоимость реализации двухосного выхода относительно ниже, чем использование двух 2D-чипов.
Преимущества:
- 1.Магнитная сталь имеет низкую трудность намагничивания. Низкая сложность сборки;
- 2.Низкая стоимость реализации двухосной конструкции;
- 3.Горизонтальное пространство рукоятки занимает меньше места;
Недостатки:
- 1.Требование к смещению патчей Холла относительно велико, а требование к смещению SMT обычно не превышает 1/2 сварочной лапки; в противном случае возникает большая двухосная интерференция (т.е. при нажатии на одну ось другая ось имеет колебания на выходе, 3D Hall не может избежать двухосной интерференции, но обычно в пределах диапазона отклонений на выходе считается квалифицированной).
- 2.Стоимость достижения одноосного выхода будет выше;
- 3.Угол поворота меньше, чем у смещающего типа (обычно не более 30°);
В рукоятке HJ8 компании Shanghai Chen Gong Electric Control используется 3D-холл MLX90333.
Ii. Факторы, влияющие на отклонение выходного сигнала Холла:
В общем случае факторы, влияющие на выходное напряжение Холла, сводятся в основном к следующим. Поскольку микросхема редко выходит из строя, причины отклонения выходного напряжения анализируются в основном по изменению магнитного потока:
- 1.Изменения магнитного потока, вызванные магнитной сталью:
Магнитная сталь изменяет магнитный поток и, соответственно, выходное напряжение по различным причинам, таким как:
- 1.Плохая защита приводит к адсорбции железного порошка на магнитной стали, что приводит к изменению магнитного потока.
- 1.Неправильное крепление магнитной стали приводит к ее ослаблению;
- 1.При заклепывании или закреплении магнитной стали возникают скрытые трещины, что может привести к образованию трещин и изменению магнитного потока после воздействия высоких и низких температур.
Способы предотвращения:
Эти факторы должны быть проанализированы и приняты меры по их устранению в ходе разработки и технологического процесса FEMA.
- 2.Изменения магнитного потока, вызванные внешними причинами:
Как правило, магнитный поток через микросхему Холла изменяется из-за колебаний схемы, вызванных внешним магнитным полем или воздействием напряжения, что влияет на выходной сигнал.
Способы устранения:
Было проведено тестирование на ЭМС, и для повышения степени экранирования микросхемы Холла был использован защитный экран.
- 3.Отклонение выходного сигнала, вызванное механической структурой:
После длительной эксплуатации увеличение механического зазора приводит к увеличению отклонения выходного сигнала.
Способы устранения:
Оптимизировать конструкцию.
- 4.Внешнее входное напряжение нерегулируемого источника питания:
В общем случае номинальное входное напряжение производителя рукоятки Холла составляет 5,0 В пост. тока±0,5 В, но на практике это напряжение относится к напряжению, приводящему в действие датчик Холла. Если значение выходного напряжения при калибровке составляет 0,5~2,5~4,5 В на выходе, входное напряжение 5,5 В, то медианное выходное напряжение составит 2,75 В, что выходит за пределы диапазона медианных требований. Поэтому заказчикам обычно рекомендуют использовать регулируемый источник питания. Отклонение напряжения питания обычно составляет ±0,2 В, в оптимальных условиях ±0,1 В.
Свяжитесь с нами > Свяжитесь с компанией Чэнь Гун техники